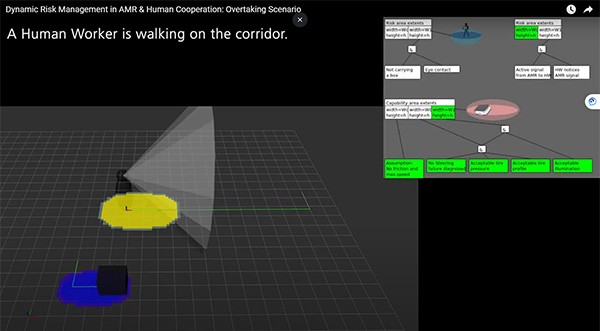
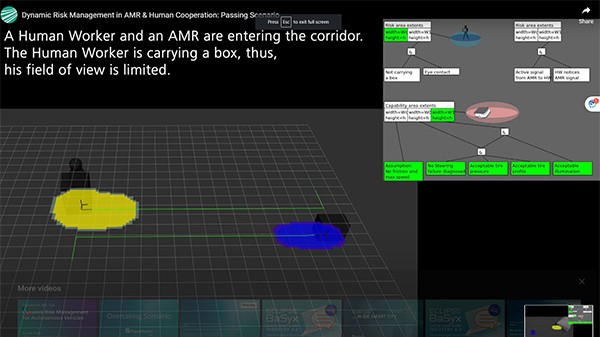
The core result was the definition of a design and assurance process for systematically engineering and executing dynamic safety mechanisms for cyber-physical systems. The resulting runtime safety components dynamically consider environmental influences on system risk and capabilities for optimizing the safety-performance trade-off. To that end, the Fraunhofer IESE reference process for engineering dynamic safety mechanisms, including the technologies Conditional Safety Certificates (ConSert) and situation-aware dynamic risk assessment (SINADRA), was adapted to the Hitachi context. This process was exemplarily executed for a smart logistics application. The resulting runtime component performance evaluation led to a predicted AMR movement time reduction of 20% in scenarios where humans and AMRs move in similar directions in shared spaces. Using the methods developed and applied, future CPS, especially in the smart logistics context, can be realized flexibly with increased efficiency and guaranteed safety.
The model-based engineering approach suggested by Fraunhofer IESE was incorporated successfully into the development project at Hitachi and will be transferred to other development projects in the future. The safeTbox tool developed by Fraunhofer IESE combines all required model-based techniques in one toolbox and facilitated the deployment of the methodology.
Scientific Publication: “Engineering Dynamic Risk and Capability Models to Improve Cooperation Efficiency Between Human Workers and Autonomous Mobile Robots in Shared Spaces” Jan Reich, Pascal Gerber, Nishanth Laxman, Daniel Schneider (Fraunhofer IESE), Takehito Ogata (European R&D Centre, Hitachi Europe), Satoshi Otsuka and Tasuku Ishigooka (R&D Group, Hitachi). Published at: 8th International Symposium on Model-Based Safety Assessment (IMBSA 2022), Munich, Germany.
 Fraunhofer Institute for Experimental Software Engineering IESE
Fraunhofer Institute for Experimental Software Engineering IESE